普通高等教育电气工程与自动化类“十一五”规划教材·电力传动控制系统:运动控制系统
出版时间:
2010-04
版次:
1
ISBN:
9787111296690
定价:
24.00
装帧:
平装
开本:
16开
纸张:
胶版纸
页数:
178页
字数:
298千字
正文语种:
简体中文
16人买过
-
《电力传动控制系统:运动控制系统》主要是针对电气工程及其自动化、自动化等专业大学本科编写的。为适应教学改革和学科发展的需要,《电力传动控制系统:运动控制系统》在陈伯时主编的《电力拖动自动控制系统》的主要内容基础上,根据当前电力传动控制技术的新发展,进行了精简和重组。全书分为5章。第1章是全书的基础,介绍了电力传动控制系统的基本组成和共性问题,包括系统基本结构与组成,电动机、电力电子变流器、系统检测和控制器的基本概念及原理。第2章以统一电机理论为基础,建立了各种电机的数学模型,并构建了电力传动系统各个环节的数学模型。第3章为直流传动控制系统,在前两章的基础上,专门分析和讨论了系统的控制原理、结构和运行特性等问题。第4章为交流传动控制系统,包括异步电动机和同步电动机的控制原理、系统结构和运行特性等问题。第5章介绍了电力传动控制系统的设计方法。
《电力传动控制系统:运动控制系统》适用于普通高等学校电气工程及其自动化、自动化专业作为本科教材使用,也适用于机械、电子等专业,并可作为职工大学、夜大及大专院校有关专业的教材,也可供有关工程技术人员阅读和参考,其中部分较深入的内容可作为研究生学习和研究的参考资料。 汤天浩,分别于1982年和1987年在上海工业大学获学士和硕士学位,1998年在上海大学获博士学位,2005年赴法国中央理工大学(EcoleCer,traledeNantes)学习和研究。
现为上海海事大学电力传动与控制研究所所长、教授、博士生导师,上海市教委重点学科“电力电子与电力传动”学科带头人。中法联合伽利略系统与海上安全智能交通研究所副所长。
已主持完成多项国家级和省部级科研项目,其中:燃料电池试验船的研发工作填补了国内在新能源船舶研究方面的空白。已在国内外公开发表学术论文100多篇,主编国家级十一五规划教材《电机及拖动基础》,自动化专业本科系列教材《电机与拖动基础》。1999年获上海市育才奖。 序一
序二
前言
常用符号表
绪论
第1章电力传动控制系统的基本结构与组成
1.1电力传动控制系统的基本结构和共性问题
1.1.1电力传动控制系统的组成与分类
1.1.2电力传动控制系统的共性问题
1.2电动机的主要类型与调速方法
1.2.1直流电动机及其调速方法
1.2.2交流电动机及其调速方法
1.3电力电子变流器的结构与类型
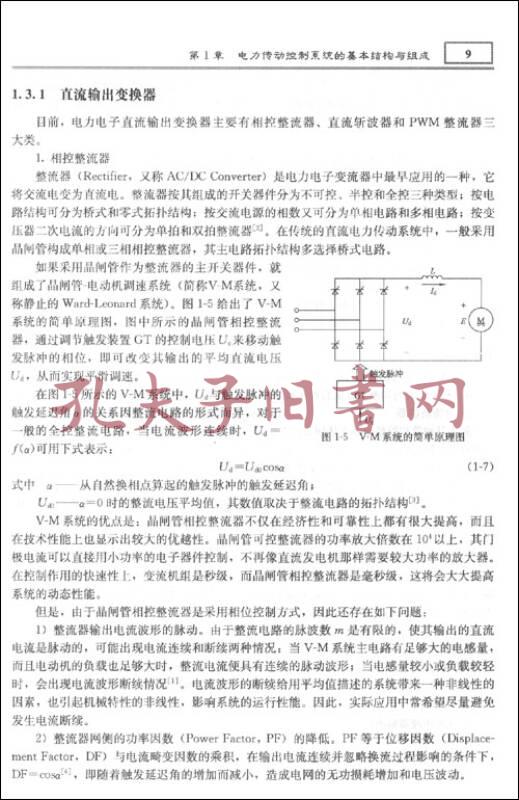
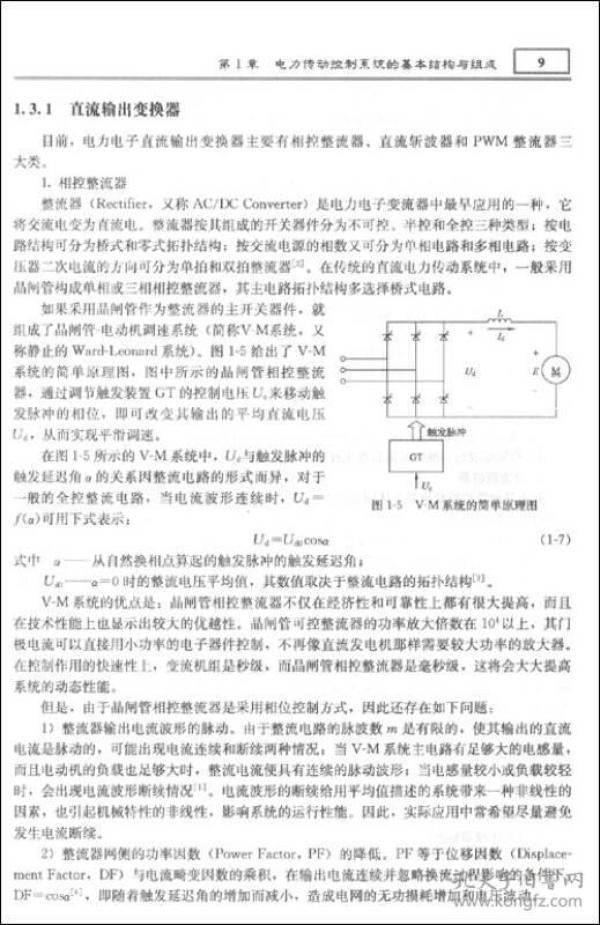
1.3.1直流输出变换器
1.3.2交流输出变换器
1.4电力传动控制系统的检测方法
1.4.1直接检测方法
1.4.2信号处理
1.4.3状态观测和参数估计
1.5电力传动控制系统的控制与分析方法
1.5.1电力传动控制系统的要求和指标
1.5.2PD控制器
1.5.3先进控制方法
1.5.4系统分析和仿真
本章小结
思考题与习题
第2章电力传动系统的模型
2.1直流电动机的模型
2.2统一电机理论模型
2.2.1统一电机理论的基本思路
2.2.2第一种原型电机
2.2.3第二种原型电机
2.2.4由统一电机理论建立的直流电动机模型
2.3交流电动机模型
2.4坐标变换理论
2.4.1线性变换简介
2.4.2坐标变换的原则及约束
2.4.3Park变换
2.5基于统一电机理论的交流电动机建模
2.5.1异步电动机模型变换
2.5.2同步电动机模型
2.6电力电子变流器的建模
本章小结
思考题与习题
第3章直流传动控制系统
3.1开环直流调速系统的组成与主要问题
3.1.1开环直流调速系统的组成
3.1.2开环直流调速系统的主要问题
3.1.3开环系统的静特性计算
3.2转速闭环直流调速系统
3.2.1转速闭环直流调速系统的组成
3.2.2转速闭环直流调速系统的稳态分析
3.2.3反馈控制闭环直流调速系统的动态分析和设计
3.2.4比例积分控制规律和无静差调速系统
3.3转速、电流双闭环直流调速系统
3.3.1直流电动机起动的要求及控制策略
3.3.2转速、电流双闭环直流调速系统的结构
3.3.3转速、电流双闭环直流调速系统的稳态分析
3.3.4转速、电流双闭环直流调速系统的动态分析
3.3.5转速和电流两个调节器的作用
3.4直流调速系统的电压与磁场协调控制
3.4.1直流电动机磁场控制的问题
3.4.2直流电动机的电压与磁场协调控制策略
3.4.3电压与磁场协调控制的直流调速系统结构与控制原理
3.5直流调速系统的可逆控制
3.5.1可逆控制的主要问题
3.5.2无环流控制的可逆直流调速系统
3.5.3有环流控制的可逆直流调速系统
3.6直流调速系统的MATLAB仿真
本章小结
思考题与习题
第4章交流传动控制系统
4.1异步电动机的变压控制系统
4.1.1异步电动机在任意旋转坐标系上的动态等效电路
4.1.2异步电动机的变压控制系统
4.1.3转速反馈闭环控制的异步电动机变压调速系统
4.1.4变压控制在异步电动机软起动中的应用
4.2异步电动机的变压变频控制系统
4.2.1变压变频调速的控制模式及其机械特性
4.2.2转速开环恒压频比控制的调速系统
4.2.3转速闭环恒定子电动势频比控制的调速系统
4.2.4按转子磁场定向的矢量控制系统
4.2.5按定子磁链控制的直接转矩控制系统
4.3绕线转子异步电动机的双馈控制系统
4.3.1绕线转子异步电动机双馈控制的基本原理和运行模式
4.3.2绕线转子异步电动机的次同步转速调速——串级调速系统
4.3.3绕线转子异步电动机的超同步转速调速——双馈调速系统
4.4同步电动机控制系统
4.4.1同步电动机在旋转坐标系的动态等效电路及方程
4.4.2同步电动机按定子磁链定向的矢量控制调速系统
4.4.3永磁同步电动机按转子位置定向的矢量控制系统
4.4.4直流无刷同步电动机控制系统本章小结
思考题与习题
第5章电力传动控制系统的分析与设计
5.1电力传动控制系统的性能指标
5.1.1电力传动控制系统的控制要求
5.1.2电力传动控制系统的稳态性能指标
5.1.3电力传动控制系统的动态性能指标
5.2电力传动控制系统的设计方法
5.2.1系统设计的基本原理和方法
5.2.2调节器最佳整定设计法
5.2.3基于典型系统的工程设计方法[1]
5.2.4数字控制系统的设计方法
5.3基于MATLAB的系统仿真方法
5.3.1MATLAB的Simulink仿真平台
5.3.2电力传动控制系统的MATLAB仿真举例
本章小结
思考题与习题
参考文献
-
内容简介:
《电力传动控制系统:运动控制系统》主要是针对电气工程及其自动化、自动化等专业大学本科编写的。为适应教学改革和学科发展的需要,《电力传动控制系统:运动控制系统》在陈伯时主编的《电力拖动自动控制系统》的主要内容基础上,根据当前电力传动控制技术的新发展,进行了精简和重组。全书分为5章。第1章是全书的基础,介绍了电力传动控制系统的基本组成和共性问题,包括系统基本结构与组成,电动机、电力电子变流器、系统检测和控制器的基本概念及原理。第2章以统一电机理论为基础,建立了各种电机的数学模型,并构建了电力传动系统各个环节的数学模型。第3章为直流传动控制系统,在前两章的基础上,专门分析和讨论了系统的控制原理、结构和运行特性等问题。第4章为交流传动控制系统,包括异步电动机和同步电动机的控制原理、系统结构和运行特性等问题。第5章介绍了电力传动控制系统的设计方法。
《电力传动控制系统:运动控制系统》适用于普通高等学校电气工程及其自动化、自动化专业作为本科教材使用,也适用于机械、电子等专业,并可作为职工大学、夜大及大专院校有关专业的教材,也可供有关工程技术人员阅读和参考,其中部分较深入的内容可作为研究生学习和研究的参考资料。
-
作者简介:
汤天浩,分别于1982年和1987年在上海工业大学获学士和硕士学位,1998年在上海大学获博士学位,2005年赴法国中央理工大学(EcoleCer,traledeNantes)学习和研究。
现为上海海事大学电力传动与控制研究所所长、教授、博士生导师,上海市教委重点学科“电力电子与电力传动”学科带头人。中法联合伽利略系统与海上安全智能交通研究所副所长。
已主持完成多项国家级和省部级科研项目,其中:燃料电池试验船的研发工作填补了国内在新能源船舶研究方面的空白。已在国内外公开发表学术论文100多篇,主编国家级十一五规划教材《电机及拖动基础》,自动化专业本科系列教材《电机与拖动基础》。1999年获上海市育才奖。
-
目录:
序一
序二
前言
常用符号表
绪论
第1章电力传动控制系统的基本结构与组成
1.1电力传动控制系统的基本结构和共性问题
1.1.1电力传动控制系统的组成与分类
1.1.2电力传动控制系统的共性问题
1.2电动机的主要类型与调速方法
1.2.1直流电动机及其调速方法
1.2.2交流电动机及其调速方法
1.3电力电子变流器的结构与类型
1.3.1直流输出变换器
1.3.2交流输出变换器
1.4电力传动控制系统的检测方法
1.4.1直接检测方法
1.4.2信号处理
1.4.3状态观测和参数估计
1.5电力传动控制系统的控制与分析方法
1.5.1电力传动控制系统的要求和指标
1.5.2PD控制器
1.5.3先进控制方法
1.5.4系统分析和仿真
本章小结
思考题与习题
第2章电力传动系统的模型
2.1直流电动机的模型
2.2统一电机理论模型
2.2.1统一电机理论的基本思路
2.2.2第一种原型电机
2.2.3第二种原型电机
2.2.4由统一电机理论建立的直流电动机模型
2.3交流电动机模型
2.4坐标变换理论
2.4.1线性变换简介
2.4.2坐标变换的原则及约束
2.4.3Park变换
2.5基于统一电机理论的交流电动机建模
2.5.1异步电动机模型变换
2.5.2同步电动机模型
2.6电力电子变流器的建模
本章小结
思考题与习题
第3章直流传动控制系统
3.1开环直流调速系统的组成与主要问题
3.1.1开环直流调速系统的组成
3.1.2开环直流调速系统的主要问题
3.1.3开环系统的静特性计算
3.2转速闭环直流调速系统
3.2.1转速闭环直流调速系统的组成
3.2.2转速闭环直流调速系统的稳态分析
3.2.3反馈控制闭环直流调速系统的动态分析和设计
3.2.4比例积分控制规律和无静差调速系统
3.3转速、电流双闭环直流调速系统
3.3.1直流电动机起动的要求及控制策略
3.3.2转速、电流双闭环直流调速系统的结构
3.3.3转速、电流双闭环直流调速系统的稳态分析
3.3.4转速、电流双闭环直流调速系统的动态分析
3.3.5转速和电流两个调节器的作用
3.4直流调速系统的电压与磁场协调控制
3.4.1直流电动机磁场控制的问题
3.4.2直流电动机的电压与磁场协调控制策略
3.4.3电压与磁场协调控制的直流调速系统结构与控制原理
3.5直流调速系统的可逆控制
3.5.1可逆控制的主要问题
3.5.2无环流控制的可逆直流调速系统
3.5.3有环流控制的可逆直流调速系统
3.6直流调速系统的MATLAB仿真
本章小结
思考题与习题
第4章交流传动控制系统
4.1异步电动机的变压控制系统
4.1.1异步电动机在任意旋转坐标系上的动态等效电路
4.1.2异步电动机的变压控制系统
4.1.3转速反馈闭环控制的异步电动机变压调速系统
4.1.4变压控制在异步电动机软起动中的应用
4.2异步电动机的变压变频控制系统
4.2.1变压变频调速的控制模式及其机械特性
4.2.2转速开环恒压频比控制的调速系统
4.2.3转速闭环恒定子电动势频比控制的调速系统
4.2.4按转子磁场定向的矢量控制系统
4.2.5按定子磁链控制的直接转矩控制系统
4.3绕线转子异步电动机的双馈控制系统
4.3.1绕线转子异步电动机双馈控制的基本原理和运行模式
4.3.2绕线转子异步电动机的次同步转速调速——串级调速系统
4.3.3绕线转子异步电动机的超同步转速调速——双馈调速系统
4.4同步电动机控制系统
4.4.1同步电动机在旋转坐标系的动态等效电路及方程
4.4.2同步电动机按定子磁链定向的矢量控制调速系统
4.4.3永磁同步电动机按转子位置定向的矢量控制系统
4.4.4直流无刷同步电动机控制系统本章小结
思考题与习题
第5章电力传动控制系统的分析与设计
5.1电力传动控制系统的性能指标
5.1.1电力传动控制系统的控制要求
5.1.2电力传动控制系统的稳态性能指标
5.1.3电力传动控制系统的动态性能指标
5.2电力传动控制系统的设计方法
5.2.1系统设计的基本原理和方法
5.2.2调节器最佳整定设计法
5.2.3基于典型系统的工程设计方法[1]
5.2.4数字控制系统的设计方法
5.3基于MATLAB的系统仿真方法
5.3.1MATLAB的Simulink仿真平台
5.3.2电力传动控制系统的MATLAB仿真举例
本章小结
思考题与习题
参考文献
查看详情
-
全新
广东省广州市
平均发货18小时
成功完成率95.57%
-
全新
广东省广州市
平均发货18小时
成功完成率95.69%
-
全新
广东省广州市
平均发货18小时
成功完成率95.79%
-
八五品
陕西省西安市
平均发货11小时
成功完成率88.89%
-
全新
北京市西城区
平均发货20小时
成功完成率86.91%
-
全新
北京市通州区
平均发货12小时
成功完成率79.93%
-
全新
广东省广州市
平均发货17小时
成功完成率95.31%
-
全新
广东省广州市
平均发货18小时
成功完成率95.08%
-
八五品
河南省鹤壁市
平均发货11小时
成功完成率93.4%
-
全新
-
全新
河北省保定市
平均发货30小时
成功完成率81.5%
-
八五品
四川省成都市
平均发货10小时
成功完成率83.55%
-
全新
北京市朝阳区
平均发货9小时
成功完成率82.12%
-
八五品
湖南省长沙市
平均发货11小时
成功完成率92.99%
-
八五品
河南省鹤壁市
平均发货13小时
成功完成率90.74%
-
九品
北京市通州区
平均发货10小时
成功完成率85.86%
-
八五品
山东省滨州市
平均发货12小时
成功完成率88.7%
-
八五品
山东省滨州市
平均发货11小时
成功完成率91.22%
-
八五品
山东省枣庄市
平均发货10小时
成功完成率92.34%
-
八五品
山东省济南市
平均发货10小时
成功完成率91.29%
-
八五品
山东省枣庄市
平均发货11小时
成功完成率90.33%
-
八五品
山东省滨州市
平均发货12小时
成功完成率88.7%
-
全新
北京市丰台区
平均发货9小时
成功完成率87.85%
-
 2
2
全新
北京市房山区
平均发货23小时
成功完成率75.33%
-
2
全新
北京市房山区
平均发货21小时
成功完成率79.94%
-
2
全新
北京市房山区
平均发货21小时
成功完成率80.32%
-
全新
四川省成都市
平均发货8小时
成功完成率98.7%
-
全新
天津市西青区
平均发货16小时
成功完成率93.36%
-
全新
江苏省无锡市
平均发货18小时
成功完成率89.06%
-
 5
5
全新
北京市丰台区
平均发货25小时
成功完成率87.03%
-
全新
北京市朝阳区
平均发货17小时
成功完成率93.6%
-
全新
江苏省无锡市
平均发货11小时
成功完成率95.47%
-
全新
江苏省南京市
平均发货10小时
成功完成率90.94%
-
八五品
山东省济南市
平均发货11小时
成功完成率93.58%
-
 7
7
八五品
重庆市沙坪坝区
平均发货9小时
成功完成率78.78%
-
全新
广东省广州市
24小时内发货
成功完成率93.44%
-
八五品
湖南省长沙市
平均发货11小时
成功完成率90.63%
-
八品
四川省成都市
平均发货8小时
成功完成率87.44%
-
电力传动控制系统——运动控制系统
①全新正版,现货速发,7天无理由退换货②天津、成都、无锡、广东等多仓就近发货,订单最迟48小时内发出③无法指定快递④可开电子发票,不清楚的请咨询客服。
全新
浙江省嘉兴市
平均发货18小时
成功完成率92.31%
-
九品
广东省东莞市
平均发货14小时
成功完成率91.9%
-
九五品
河北省廊坊市
平均发货14小时
成功完成率92.78%
-
九品
北京市昌平区
平均发货13小时
成功完成率90.47%
-
八五品
广东省东莞市
平均发货14小时
成功完成率91.9%
-
全新
四川省成都市
平均发货26小时
成功完成率89.35%
-
全新
广东省广州市
24小时内发货
成功完成率90.92%
-
全新
浙江省嘉兴市
平均发货10小时
成功完成率92.95%
-
八五品
江西省南昌市
平均发货11小时
成功完成率81.2%
-
 7
7
八五品
-
八五品
河南省鹤壁市
平均发货12小时
成功完成率94.33%
-
 7
7
2010-04 印刷
印次: 1
八五品
安徽省蚌埠市
24小时内发货
成功完成率97.12%